 mdpi.com
mdpi.com ieeexplore.ieee.org
ieeexplore.ieee.org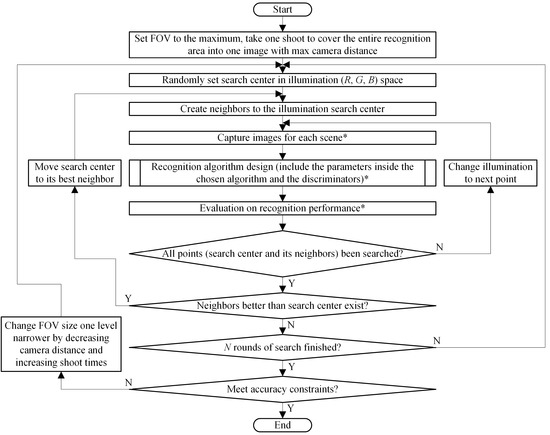


株式会社日立産業制御ソリューションズ / 研修員
三相誘導モータソリューションの開発
社内プロジェクトである。 モータ制御ソフトをパッケージ化して、マイコンメモリの中に外部から読込めない特殊なエリアに格納する。ユーザに対して、APIやインターフェースを提供する。 その中に、コーディング、テスト(単体と組合せ)と不具合対応を担当した。
Discover companies you will love
株式会社スマートロボティクス / エンジンニア
Available to logged-in users only
業務で実戦を通してAIに関わる新しい技術を身に着けたい! 具体的には、機械学習を用いて課題を解決するとか、 画像認識ソリューションの導入(例:自動運転)などを経験し、 常に自分を新たなテクノロジーを使える様にアップデートしたい!
移動ロボットソフトウェア開発 (ファームウェア設計・開発、ROS開発)
■概要 HIPPOは工事現場で荒清掃を実施するロボットである。 フィルタなしかつワンボタンで制御できるため、 足回りのPID制御処理、各種センサ値の取得処理と走行アルゴリズムなどの設計・開発を行った。
組込みソフト開発 (機能設計、詳細設計、プログラミング、テスト)
社外活動である。 EVミニカートは一人乗せられる小型電動カートである。 そのEVミニカートのバッテリー残量、スピード、モータステータス(電流や電圧など)をBluetooth通信でandroidスマホに表示するアプリの作成を担当した。 2019年度6月と9月の大会でチームメンバとして出場し、準優勝を2回受賞した。
研論:ピックアンドプレース視覚システムの視野、照度、認識アルゴリズムの自動設計
大学卒業テーマである。 6自由度ロボットアームを作成し、マイコンにモータ制御ソフトを組込んで制御する。 人間の動きを真似して、ロボットアームを通して綿飴機を操作し綿飴を作る。
卒論:綿飴ロボットの開発
株式会社日立産業制御ソリューションズ / 研修員
社内プロジェクトである。 モータ制御ソフトをパッケージ化して、マイコンメモリの中に外部から読込めない特殊なエリアに格納する。ユーザに対して、APIやインターフェースを提供する。 その中に、コーディング、テスト(単体と組合せ)と不具合対応を担当した。