




宇都宮大学 / 基盤工学部 機械システム工学科
ROS2 × Firebase モビリティ制御プラットフォーム
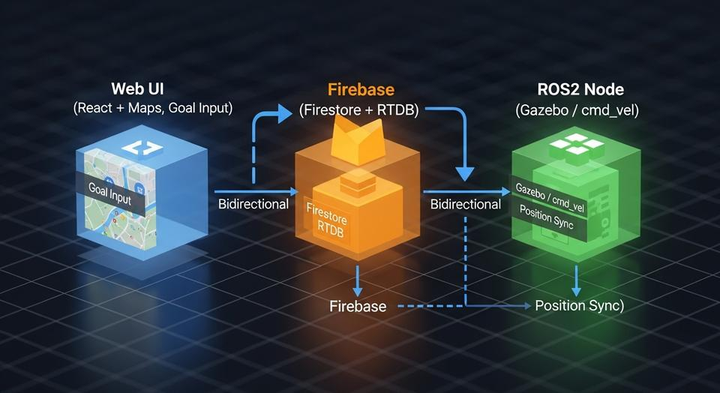
ROS2 × Firebase を統合したクラウドロボティクス基盤を、要件定義から設計・実装まで個人で構築しました。 ■ 目的 Web UI からロボットへ指示を送り、位置情報・センサ状態をクラウド経由で双方向同期させる「クラウドロボティクス基盤(MVP)」 の構築。 ■ 行ったこと ▼ ROS2 / Mobility 側 ・ROS2 Humble + TurtleBot3 によるシミュレーション環境構築 ・Nav2 を利用した経路追従、/cmd_vel・/odom・/tf のトピック制御 ・GNSS座標 ↔ ローカル座標の変換ロジック実装 ▼ クラウド連携(Firebase / GCP) ・Firestore / Realtime Database と ROS2 の双方向同期ロジックを実装 ・ハッシュ検出による重複制御、2Hz/5Hz の同期チューニング ・位置・速度・ステータスのクラウド側データモデル設計 ▼ Web UI / データ可視化 ・Google Maps API から目的地入力 → ロボット制御への連携 ・Firestore のロボット位置をリアルタイム可視化する独自 UI を実装 ・API Key の環境変数化など、安全性を考慮した管理方法へ段階的に改善 ▼ 開発基盤 / 運用視点 ・Docker / Ubuntu / VSCode DevContainer による開発環境構築 ・アーキテクチャ図・データフロー図の作成 ・GitHub 管理、デモ動画制作、README 整備 ■ 研究室からの支援 ・Google Maps API の提供 ・中間レビュー(3回程度) → 実装・設計はほぼすべて個人で自走 ■ 学んだこと・得た視点 ・Mobility × Cloud × Web の統合アーキテクチャ設計 ・遠隔制御のリアルタイム性とスケールを考慮したクラウド構成 ・“AI coding を補助に留め、自分の理解を軸にした実装” へ改善 ・MVP の構築 → ボトルネック発見 → 設計転換 の開発プロセス クラウドロボティクスの一連の実装を通して、 サービスレベルのロボット運用基盤に必要なアーキテクチャ理解と実践力 を身につけました。