


早稲田大学大学院修士 / 工学研究科(IPS)
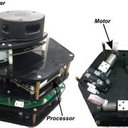
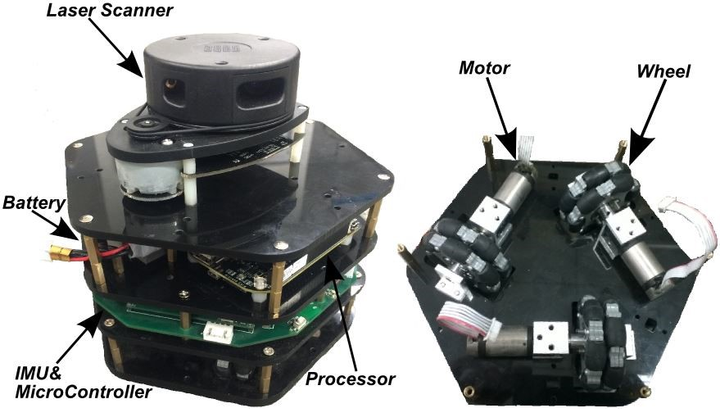
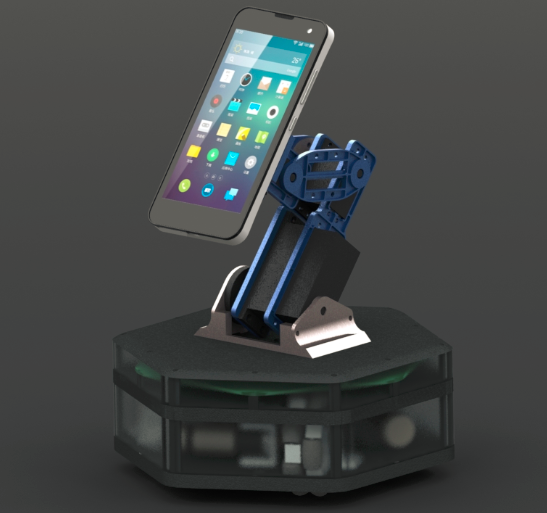
Omnidirectional Mobile Robot
Robot Mechanism Design, Control System Design.
Discover companies you will love
ZMP / Software Engineer, Behavior & Motion Control
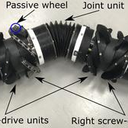
Registered patents for the underwater I designed and set up a company for it. The underwater snake robot with screw-drive mechanism is still under development and commercialization as a hobby.
I worked as a software engineer for the behavior and motion control of general vehicles, focusing on establishing and developing the behavior and motion control library for airport tow trucks and EvBus.
水陸両用ねじ推進ヘビ型ロボット Mechanical design, modeling of hydrodynamics and robot dynamics, control system design, simulator development for underwater snake robot with screw-drive mechanism.
Control system design of an omnidirectional mobile robot.
Automation Engineering.
早稲田大学大学院修士 / 工学研究科(IPS)
Robot Mechanism Design, Control System Design.