Manufacturing Process of a Novel Tri-Axial Tactile Sensor for Robotic Hand’s Skin
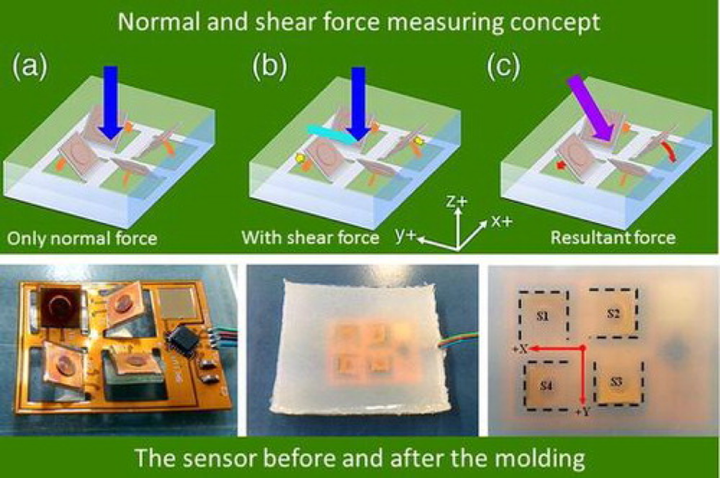
The motive behind this research was the limitations that current sensors had, either in multimodality, resolution, and robustness. Due to those issues, hand sensors still could not sense as well as a human hand does. Hence, robotic hands still could not perform accurate feedback performance such as object grasping, to a degree comparable to humans. The development of technology, however, especially MEMS, has allowed such sensor to be created. The sensor that I developed is a tri-axial force sensor that applies the concept of parallel-plate capacitor in the deformation of a copper plate with respect to a circuit board’s grounded surface. By the time of my graduation, the sensor was developed to the point that it fits a 2x3cm area, able sense forces in three axes, robust, and very sensitive.