

小型二足歩行ロボット


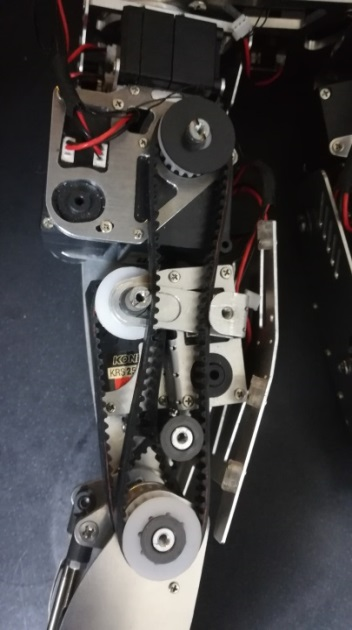

目的:高速走行のために軽量、低慣性モーメント、高出力重量比な小型二足歩行ロボットの実現 担当箇所:全て(ハードウェア、回路、ソフトウェア等の設計・制作) 構成:ハードウェア;タイミングベルトとパラレルリンクによるモータユニットの集中化&可動軸の直交化 結果:ソフトウェア開発中(関節駆動テストまで達成)
You'll be able to see their introduction and other information once they have accepted your connection request.
目的:高速走行のために軽量、低慣性モーメント、高出力重量比な小型二足歩行ロボットの実現 担当箇所:全て(ハードウェア、回路、ソフトウェア等の設計・制作) 構成:ハードウェア;タイミングベルトとパラレルリンクによるモータユニットの集中化&可動軸の直交化 結果:ソフトウェア開発中(関節駆動テストまで達成)