




Design and Application of wall climbing robot
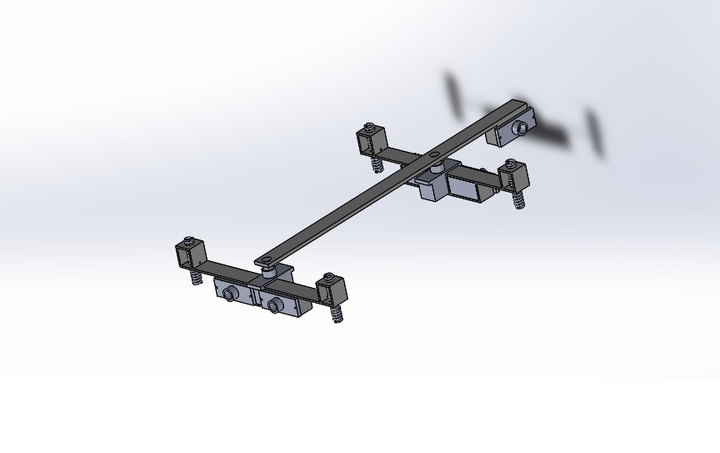
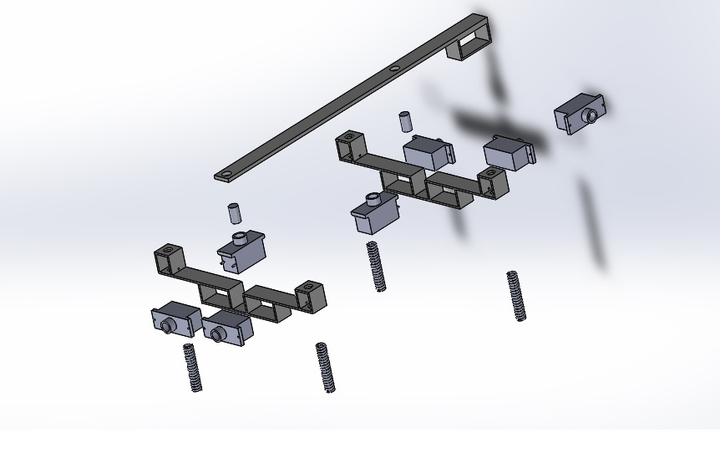
The purpose of this thesis was to develop a four legged wall climbing robot capable of climbing and navigating on smooth surfaces of various angle of inclination with the help of dry adhesives. The robot is inspired by the movement and motion of a Gecko lizard. The robot tries to mimic the climbing gait of the Gecko lizard.