Business social network with 4M professionals
Mid-career
New Graduate
Mid-career
New Graduate
Share this post via...
Yoshihiro Sakamoto
早稲田大学総合機械工学専攻。同大学招聘研究員兼非常勤講師。博士(工学)。専門はロボット工学と測位技術。これまで、フリーランスエンジニアとして、組み込み系開発から高周波回路設計、ロボット開発、Web・DBシステム開発、Windowsアプリ開発、サーバ運用、データ分析など、様々な業務を経験。不惑の四十を前に東京ロボティクス設立を決意。歴史好き。
東京ロボティクス株式会社's members
早稲田大学総合機械工学専攻。同大学招聘研究員兼非常勤講師。博士(工学)。専門はロボット工学と測位技術。これまで、フリーランスエンジニアとして、組み込み系開発から高周波回路設計、ロボット開発、Web・DBシステム開発、Windowsアプリ開発、サーバ運用、データ分析など、様々な業務を経験。不惑の四十を前に東京ロボティクス設立を決意。歴史好き。
What we do
東京ロボティクスは、先進的なロボットの開発を行うために2015年に創業したロボティクススタートアップです。力制御可能なシリアルリンクロボットの構築で世界トップクラスを自負しており、これまで、研究用人型ロボットの販売と先端的なロボットアプリケーションの共同開発により事業を継続してきました。現在は、人型ロボットの社会実装をメインテーマとして、ハードウェアの開発に加えて模倣学習や強化学習の研究開発も行っています。




What we do

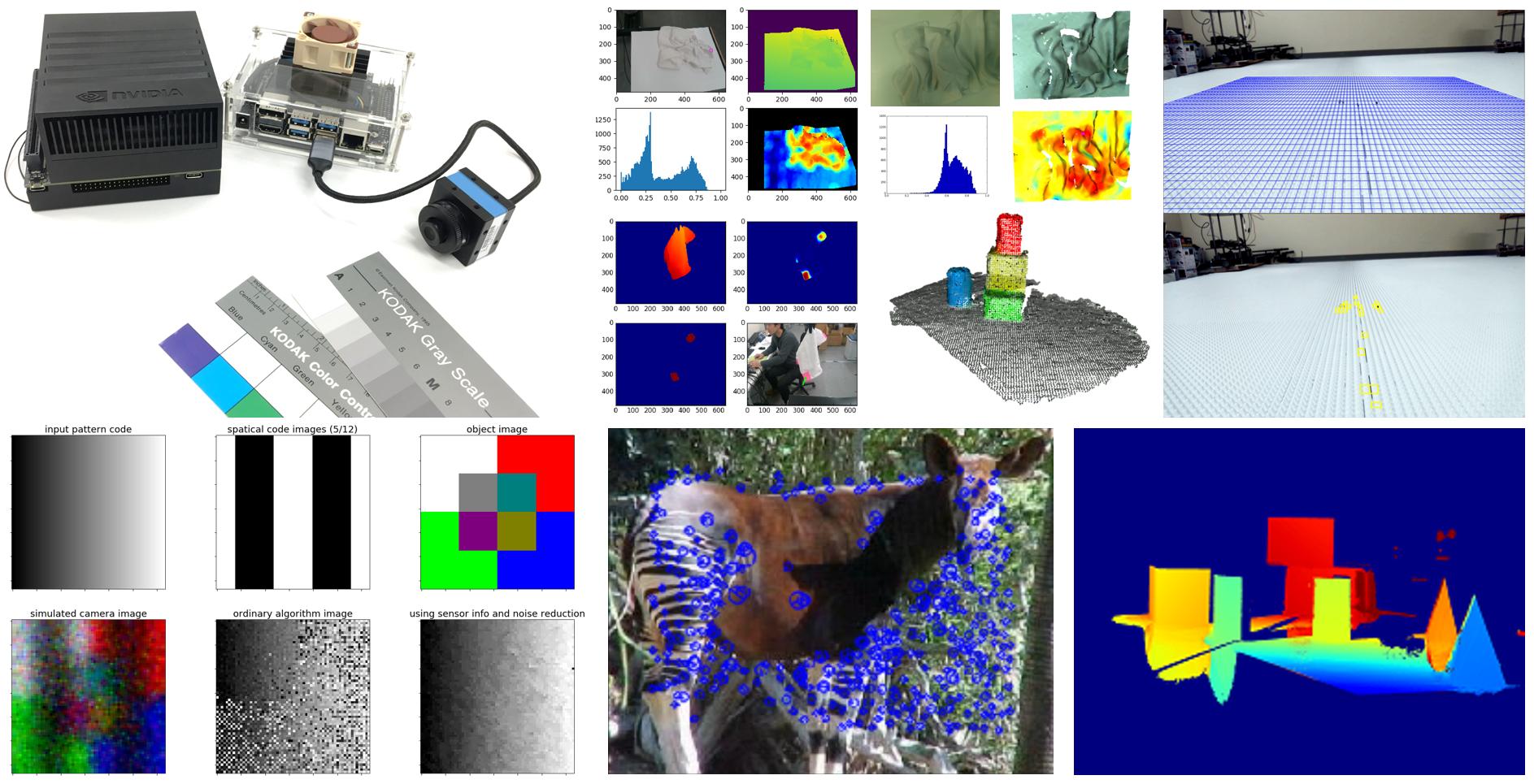
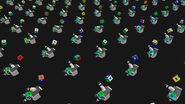
Torobo2+多指ハンド
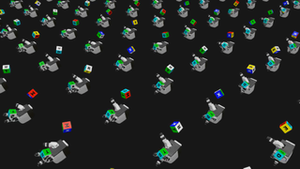
インハンドマニピュレーションの学習の様子
東京ロボティクスは、先進的なロボットの開発を行うために2015年に創業したロボティクススタートアップです。力制御可能なシリアルリンクロボットの構築で世界トップクラスを自負しており、これまで、研究用人型ロボットの販売と先端的なロボットアプリケーションの共同開発により事業を継続してきました。現在は、人型ロボットの社会実装をメインテーマとして、ハードウェアの開発に加えて模倣学習や強化学習の研究開発も行っています。
Why we do

Vision
当社の使命は、人型ロボットを社会実装することで世の中から人手不足をなくすことです。本国を含む先進国では少子高齢化が進み、労働力不足が顕著であるため、ロボットの普及が喫緊の課題となっています。これを人型ロボットによって解消することが我々の望みです。
また、人型ロボットは、自動車に続く基幹産業とも言われているため、世界的に激しい開発競争となっています。日本はリソースの少なさで立ち遅れている面もありますが、少なくとも日本市場は国産のロボットでシェアを取るべきと考え、ハードウェアの開発・製造にこだわっています。
How we do

繁忙期のオフィス

私たちの価値観
メンバーは、ロボットやAIが好きということで共通しています。主要メンバーは、機械、電子回路、制御・組み込みソフトウェア、認識・AIの担当に分かれ、各自専門性を高めつつ協力し合っています。「良いロボットを作る」という一点に集中し、日々黙々と仕事をしています。口よりも手を動かすことが大事なので、職場は意外と静かです。
As a new team member
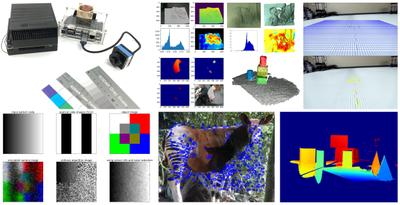
自律ロボットには、対象物の位置検出、三次元形状認識といった画像認識処理が不可欠です。
ただし、自律ロボットは基本的にバッテリ駆動であるため、消費電力の小さいエッジデバイス上で処理を実行できる必要があります。
そこで、映像信号処理、点群処理、画像認識の実務経験者で、かつ以下のようなスキルを持っている/身につけたいエンジニアを募集しています。
<画像処理関連>
・ノイズ除去・平滑化・エッジ抽出のための画像処理の理解と実践経験
・各種画像解析手法の理解
・一般物体認識に必要なSIFT特徴量等の理解
・カメラキャリブレーションの理解
・ステレオ画像から三角測量法を用いて3次元情報を復元する3次元ステレオ計測法の理解
・レンズ・イメージセンサを用いた光学設計の理解
<実装関連>
・オブジェクト指向やデザインパターンに基づいたソフトウェア設計の理解と実装経験
・C/C++11の実装経験
・OpenCVを用いた画像処理プログラムの実装経験
・マルチスレッドプログラミングの実装経験
・PointCloudLibraryを用いた三次元点群処理の実装経験
画像認識処理をエッジデバイス上に実装し、自律ロボットに活用してみたい方は是非ご応募ください。
0 recommendations
Highlighted stories
More from 東京ロボティクス株式会社
- 組み込み系エンジニア
ロボットの根幹、組み込み系エンジニア募集
- 電気回路・電子回路エンジニア
電気・電子回路のエキスパートまたはそれを目指す若手募集
- ロボットエンジニア
基盤モデルでロボットを知能化するエンジニア募集
0 recommendations
What happens after you apply?
- ApplyClick "Want to Visit"
- Wait for a reply
- Set a date
- Meet up
Company info
Founded on 01/2015
25 members
- Funded more than $1,000,000/
東京都新宿区山吹町347 藤和江戸川橋ビル5階