Business social network with 4M professionals


Yukihisa Karako
オムロンの研究開発部門にいるロボット制御系エンジニアです。 プロトタイピングが得意で、自分でハード(センサ・アクチュエータ)からソフト(認識・制御)まで幅広く扱え、インテグレーションできるのが強みです。 <会社での仕事> 産業用ロボットのマニピュレーション制御に関して4年間ほど研究開発をしてきて、すっかりロボット開発の虜になりました。 しかし、開発しているだけでは人を幸せにしている実感を得られず、事業全体のデザインもできるようになろうと社内コンペで新規事業アイデアを提案、今は新規事業企画に挑戦しております。 <趣味> スポーツ(サイクリング、ビーチラグビー、野球)、ゲーム(囲碁、ボードゲーム、デジタルゲーム)、読書(漫画、専門書)、プログラミング、などが好きです。 興味の赴くままに行動するため、趣味は常に変わっていきます。
雄大 道心
キヤノンに入社後、調達部門に配属され2年間工場にて光学製品のメカ部品バイヤーに携わる。VE活動に取り組み、EFレンズ製品多機種について1千万円規模のコストダウンを立案、実行。 その後、DSCメカ設計部門に異動し、デジタルカメラのメカ設計者に従事。8年でコンパクトデジタルカメラ5機種、一眼レフカメラ1機種のメカ設計を担当。主に操作系、発光部(フラッシュ機構)等、外装操作機構部について、企画立案、規格策定、設計、量産品質確保の立案、実行業務に携わる。特許15件程度提案、執筆を行う。 特許提案活動においてGrリーダーとして、新規コンセプト機に関わる企画立案を行い、5名で8件の特許提案を達成した。
yuki yoshikawa
# 念頭に置いている言葉など ● 凡事徹底 ● 健康第一 ● 士農工商 ⠀○ 過去の身分を表す単語的視点というよりは,主に五輪書の導入部の記述に発想を受けた視点です. ⠀○ "士"は武士というよりは士業やそれに近い社会的立ち位置を表す文字として,ここでは考えます. ⠀○ 人の生業・生活は,多様な存在の総合的な関連性やその仕事無くしておそらく成立しないですし, ⠀⠀ それは過去に記述のあるその単語の実在が証明しているのではないか, ⠀⠀ 金を頂いて仕事をするプロとして心得るべき視点ではないかという意味で多少念頭に置いています. ● 実るほど頭を垂れる稲穂かな # 尊敬・参考にしている人 (自分がその域でないが故に参考にしているような方々です.) ● 梅原大吾さん: 現代の勝負師としての姿や習慣・価値観を参考にしています. ● 呂布カルマさん: 一貫性のある価値観・生き方や,それに矛盾の無い言葉遣いは尊敬に値する域だと思います. ● 武井壮さん: ゴールを逆引きした徹底した生き方や価値観・行動方針は参考にしています. ● その他の歴史上の人物: 蒲生氏郷,ボードゥアン4世,ベルトラン・デュ・ゲクラン等
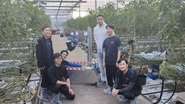
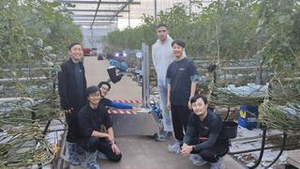
inaho株式会社's members
What we do




What we do

現場主義:現場を体験することでリアルな課題をみつけることができます。農家さんと一緒に現場で仕事をし、解決策のアプローチを見出すことも。自動化の必要性を実感。

トマトを自動で収獲するロボットをメインに開発しています。
Why we do
How we do

ICCピッチコンテストで優勝!

開発はオフィスで起きてるんじゃない。現場で起きてるんだ!
As a new team member
Highlighted stories
More from inaho株式会社
- 採用人事/エンジニア採用
採用人事 | グローバル展開に挑むアグリスタートアップの採用リーダーを募集
1 recommendation
What happens after you apply?
- ApplyClick "Want to Visit"
- Wait for a reply
- Set a date
- Meet up
Company info
Founded on 01/2017
18 members
- Expanding business abroad/
- Funded more than $1,000,000/
- Funded more than $300,000/
神奈川県鎌倉市御成町11−2