Business social network with 4M professionals


Mid-career
Expanding business abroad
Mid-career
Expanding business abroad
Share this post via...
Hiroya Masuoka
国産ヒューマノイドの株式会社Highlanders CEO / 東北大学特任教授(客員)を兼任。 国プロ研究代表として、世界初の飛行中ドローンによる空中バッテリー交換技術を開発、国際特許を取得。 RENATUS ROBOTICS社の設立にも携わり、最高情報責任者として尽力。 「拙速は巧遅に勝る」を合言葉に、誰よりも速くトライ・失敗・すぐに改善するスタイルを大切にしています。
株式会社Highlanders's members
Selectable
Hiroya Masuoka
CEO
国産ヒューマノイドの株式会社Highlanders CEO / 東北大学特任教授(客員)を兼任。
国プロ研究代表として、世界初の飛行中ドローンによる空中バッテリー交換技術を開発、国際特許を取得。
RENATUS ROBOTICS社の設立にも携わり、最高情報責任者として尽力。
「拙速は巧遅に勝る」を合言葉に、誰よりも速くトライ・失敗・すぐに改善するスタイルを大切にしています。
What we do
Highlandersは、フィジカルAIを軸にヒューマノイドロボット・四足歩行ロボットの
ハードウェアからソフトウェアまで一気通貫で自社開発し、製造販売までを展開する東大発ロボティクススタートアップです。
フィジカルAIにおいて重要なのは、
アルゴリズムの賢さだけでなく、
・どのような身体構造・自由度を持つか
・どのような力学制約・外乱条件に置かれるか
・現実世界でどのように壊れ、どのようにメンテナンスを行うか
といった 「物理的な前提条件」そのものです。
Highlandersでは、AIとロボットハードウェアを高度に統合しながら、
・製造現場
・インフラ点検
・物流倉庫
・災害現場
といった 人手不足が深刻な現場で
実際に使われるフィジカルAIロボットを開発しています。
研究で終わらせず、
「現場で動く」「社会で使われる」ことを前提に
プロダクト開発から社会実装まで自社でやり切ることを大切にしています。





What we do

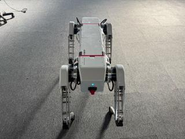
ヒューマノイドのプロトタイプ(初期)
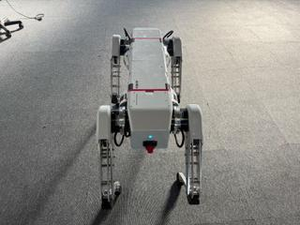
4足歩行ロボット
Highlandersは、フィジカルAIを軸にヒューマノイドロボット・四足歩行ロボットの
ハードウェアからソフトウェアまで一気通貫で自社開発し、製造販売までを展開する東大発ロボティクススタートアップです。
フィジカルAIにおいて重要なのは、
アルゴリズムの賢さだけでなく、
・どのような身体構造・自由度を持つか
・どのような力学制約・外乱条件に置かれるか
・現実世界でどのように壊れ、どのようにメンテナンスを行うか
といった 「物理的な前提条件」そのものです。
Highlandersでは、AIとロボットハードウェアを高度に統合しながら、
・製造現場
・インフラ点検
・物流倉庫
・災害現場
といった 人手不足が深刻な現場で
実際に使われるフィジカルAIロボットを開発しています。
研究で終わらせず、
「現場で動く」「社会で使われる」ことを前提に
プロダクト開発から社会実装まで自社でやり切ることを大切にしています。
Why we do

雪山での歩行実験

所沢開発拠点での作業の様子
日本は、世界でも稀有な製造業基盤とロボット技術を持つ国です。
フィジカルAI時代においてロボットの性能はアルゴリズム単体の賢さでは決まりません。
ロボットの身体設計
制御との相互作用
現場ごとの環境制約や運用条件
こうした ハードウェア・制御・現場適応力の総合力によって、
初めて実用的な価値が生まれます。
Highlandersは、
日本が本来強みを持つ
ロボット × 製造 × 現場力を基盤に、
フィジカルAIを産業として再構築することで、
再び世界で戦える国にする
その一端を担いたいと考えています。
How we do
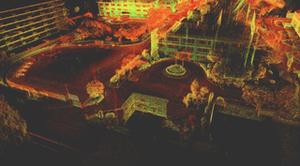
歩行ロボットで取得した点群によるマップ(SLAM)

新しいAIモデルの歩行実験失敗(転倒)
Highlandersの最大の特徴は、
ロボットハードウェアとAIの両方を自社で深く理解し、共に設計していることです。
機械・電気・制御・AI研究者が同じチームで議論し、設計する
シミュレーションだけでなく、
実機による失敗と改善のサイクルを超高速で回す
企業・省庁・研究機関と密に連携し、
実運用を前提とした検証を行う
歩行ロボットで取得した点群データによるSLAM、
新しいAIモデルの歩行実験での転倒や破損――
そうした「失敗」もすべて開発の一部です。
このサイクルを回し続けることで、「理論的に正しい」だけでなく
失敗から学び、現場で成立する本当に使えるフィジカルAI・ロボティクスを実現しています。
職種や立場を超えてフラットに議論し、
若手やインターンでも、
何度も失敗しながら開発の中核に関われる。
それがHighlandersのカルチャーです。
As a new team member
本ポジションでは、
ロボットの行動生成を担うAI/機械学習エンジニアとして、
研究開発の中核を担っていただきます。
◾️具体的な業務内容
強化学習/VLAによるロボット行動方策の設計・最適化
NVIDIA Isaac/MuJoCoを用いたシミュレーション基盤構築
Vision Transformer 等を用いた知覚モデルの開発
RLHF などの先端手法のロボット適用
Sim2Real を前提とした学習・評価設計
実機テスト・検証
◾️必須スキル・経験
NVIDIA Isaac/MuJoCoの使用経験
PyTorch / TensorFlow を用いた深層学習モデル開発経験
強化学習、またはロボティクス制御に関する研究・実務経験
◾️歓迎する経験・志向
GPUクラスタの運用経験
Sim2Real の実装・検証経験
ロボット実機での検証に強い関心がある方
研究と実装の両方をやり切りたい方
◾️このポジションの魅力
四足歩行・ヒューマノイドという
世界でも最難関クラスの制御対象
シミュレーション止まりで終わらない研究
学術と社会実装の境界で仕事ができる
◾️勤務地・働き方
ハイブリッド勤務(リモート/所沢開発拠点)
※実機検証時には
所沢開発拠点への出勤あり
3 recommendations
More from 株式会社Highlanders
- ToB Sales
新たな市場を、自らつくる。ヒューマノイドの事業開発・営業を募集
3 recommendations
What happens after you apply?
- ApplyClick "Want to Visit"
- Wait for a reply
- Set a date
- Meet up
Company info
Founded on 05/2023
31 members
- Expanding business abroad/
- Funded more than $300,000/
- CEO can code/
- Funded more than $1,000,000/
東京都豊島区南大塚2丁目11−10 ミモザビル3F